船用六分仪使用详解
最近天文热度颇高,那说天文第一个离不开的便是六分仪,今天就带来六分仪的详细使用说明。全文约3500字,阅读约10分钟,理解掌握么,小伙伴那么聪明,半小时搞定?
序言
随着地区局势的严峻,天文导航艺术又回到了它的舞台,对于航海者而言,通过传统六分仪,航海天文历、天体高度方位表、秒表测算船位的过程,蕴含着一种令人愉悦的美感。
电影中常常出现这样的场景:船长用六分仪“捕捉太阳”,然后回到海图前进行一系列令人费解的计算,片刻之后,他便能确定船只的精确位置。
今天就从最基础的开始,请不要跳过,因为它们能让你真正掌握航海者的语言。
基础篇
1、认识你的六分仪
2、校准与误差修正
3、六分仪读数方法
4、地面导航(测距)
5、进阶地面导航(测距)
应用篇
6、海上定位
7、截距法
8、修正项
9、作图
10、北极星求纬度/太阳中天求纬度/太阳移线定位(题目大了点,下篇再讲,三星定位看公众号第一篇)
1、认识你的六分仪(有基础可跳过)
1.1 什么是六分仪?
六分仪是一种用于海上导航的精密仪器,主要用于测量两个远距离物体之间的夹角。最常见的应用是测量太阳或其它天体与水天线之间的角度。
有人认为六分仪可以直接给出准确的海上位置,这是不正确的。六分仪唯一能做的就是以极高的精度测量角度。
六分仪这一名称源自其六分之一圆周的弧形刻度盘,该刻度盘像量角器一样被精确划分。接下来将先全面介绍其结构细节。
注意:六分仪是及其精密的仪器,避免碰撞以及防范环境温度变化的影响。
1.2 六分仪结构解析
望远镜系统:望远镜是用于观测的目视部件,采用标准规格(3.5倍放大率,40mm物镜口径)
安全告知:严禁在未安装滤光片的情况下直接观测太阳。(后文关于滤光片另有说明)
握柄系统:六分仪必须且仅能通过专用握柄持握。握柄内设电池仓,可为照明装置供电。(此处重点,赶紧试试灯亮不亮吧)
禁止通过望远镜或者其它可动部件持握仪器,长期停用时应取出电池。
照明系统:现代六分仪多配备刻度盘照明系统,便于夜间航行时读取数据。但此装置并非必要,完全可以在室外完成测量后,返回室内进行读数。
指标臂系统:指标臂是六分仪的核心运动部件,专门用于角度测量。操作提示:禁止施加任何外力强行移动指标臂。
快速释放卡钳装置:当需要大范围调节指标臂时,需使用快速释放卡钳。同时按压卡钳两侧部件即可解除锁定,自由移动指标臂。
动镜(垂直镜)系统:动镜用于反射天体的入射光线,包括太阳、月亮、太阳系行星以及遥远恒星的光源。镜体背部设有校准螺丝,使用六分仪前必须确保仪器完成全面校准。
定镜(边镜)系统:现在有两种主流结构:A半透半反式、B整体50%透光镀膜式。镜体背部同样设有校准螺丝,使用六分仪前必须确保仪器完成全面校准。
微调鼓轮系统:作为六分仪的核心部件之一,专用于天体观测时的角度微调。
滤光片系统:观测太阳时,必须启用滤光片,一般配有三种滤光片。始终由透光率最低的滤光片开始观测,若视野过暗无法辨识,再逐步更换高透光率滤光片。
刻度弧架系统:六分仪的核心承力部件,整体框架采用航空铝材或者合成材料铸造,所有光学组件均固定于其之上。
2、校准与误差修正(前一篇三星定位中已经阐述,今天就再讲讲)
2.1 校准的必要性
每一次使用六分仪之前,都必须进行校准以确保测量精度。其主要原因有:
a.温度变化导致读数偏差
b.机械结构受力变形
2.2 器差
出厂由厂家负责测定,附在六分仪仪器箱中。
2.3 动镜差(垂直差)
将指标杆放在刻度弧30°~40°之间,水平放置于桌面上,从动镜镜片中观察里外两段刻度弧,如果里外两段刻度弧连接成一体,则动镜和刻度弧平面垂直,无须校正。如错开,则慢慢转动动镜后小螺帽,直至里外两段刻度弧相连成一体。
2.4 定镜差(边差) 将指标杆放到刻度弧0°,调整焦距,对准天体(白天太阳,晚上满月为宜),可见直射影像和反射影像,转动小鼓轮,使反射影像的上下位置与直射影像重合,观察两个影像的左右水平位置,调整定镜后的小螺帽,直至直射影像和反射影像组成一个完整的圆(太阳或月亮)。
2.5 指标差 通常采用水天线测定。刻度弧调整至0°,从定镜中观察水天线,调节小鼓轮,直至水天线成一直线,此时读取六分仪读数m,得到指标差i = 0° - m 。若测得的指标差大于6'即0.1°,调节定镜靠近架体的小螺帽,以减小指标差。调节完后,需从第一步动镜差开始,重新再调节一遍。
640?wx_fmt=jpeg&watermark=1定镜后有2个螺丝,左边靠近架体的调整过大的指标差,右边调定镜差。
2.6 六分仪操作守则 (1)绝对禁止施加任何外力 (2)任何调节螺丝旋转不超过两圈 (3)使用前必须完成校准程序 (4)所有校
镜片中观察里外两段刻度弧,如果里外两段刻度弧连接成一体,则动镜和刻度弧平面垂直,无须校正。如错开,则慢慢转动动镜后小螺帽,直至里外两段刻度弧相连成一体。
2.4 定镜差(边差)
将指标杆放到刻度弧0°,调整焦距,对准天体(白天太阳,晚上满月为宜),可见直射影像和反射影像,转动小鼓轮,使反射影像的上下位置与直射影像重合,观察两个影像的左右水平位置,调整定镜后的小螺帽,直至直射影像和反射影像组成一个完整的圆(太阳或月亮)。
2.5 指标差
通常采用水天线测定。刻度弧调整至0°,从定至0°,从定镜中观察水天线,调节小鼓轮,直至水天线成一直线,此时读取六分仪读数m,得到指标差i = 0° - m 。若测得的指标差大于6'即0.1°,调节定镜靠近架体的小螺帽,以减小指标差。调节完后,需从第一步动镜差开始,重新再调节一遍。

定镜后有2个螺丝,左边靠近架体的调整过大的指标差,右边调定镜差。
2.6 六分仪操作守则
(1)绝对禁止施加任何外力
(2)任何调节螺丝旋转不超过两圈
(3)使用前必须完成校准程序
(4)所有校
准操作需再20+-5°C环境温度下或参考说明书
(5)调节螺丝每旋转90°需停顿10秒观察光学反馈
3、六分仪读数方法
请看下图

首先读取刻度弧上的数字,为20°;
接着看鼓轮,先找到0对准的,为15′
最后看哪2个刻度齐平,图中0.6′和18′齐平。
所以最后的读数为20°15.6′。
六分仪的基本概况就介绍到这,后续将开始借助数学工具。接下来,将通过地面导航迈出天文导航的第一步。
4、地面导航(测距)
4.1 距离测算原理

为了计算出物标与测者之间的距离,我们需要哪些数据?
a.六分仪读数(测得并修正后)
b.灯塔高度
c.公式(都忘了吧)
tanα° ≈ (α’/60)/(180/3.14)=α’/3437.75
D(nmile)=(H(m)/1852)/(α’/3437.75)
=1.856 H / α’
= 13 H / 7 α’
α’ 为 度° 转为 分‘,后文均统一为分‘
地理初显(隐)距离公式:
D = 2.09 * (√H + √e) (估计也忘了)
刚才讨论的简单场景满足:
a.计算公式直接可用
b.可同时观测塔顶与底部
接下来,随着距离增加将出现:
a.初始阶段:观测角度逐渐减小
b.临界阶段:底部沉入水天线以下
c.测量困境:无法获取完整参照物
核心问题:
a.此时测量哪个角度
b.公式是否仍然适用
5、进阶地面导航(测距)
当与灯塔距离增大时,地表曲率将完全遮挡底部视野,导致之前公式完全失效。
现有公式数据:
a.灯塔高度
b.观测仰角(测得并修正后六分仪读数,后文统一用仰角替代)
新增变量:眼高
当灯塔基底不可见时:
原方法:塔顶与基底对齐
新方案:改用可见地平线作为基准参照物
公式:(推导请看后面图片)
D∧2-2.09(2√HE-2.09*1852*tanα’)D-2.09^2(HO - HE) = 0
D 距离 HO 灯塔高 HE 眼高 α 仰角
看似复杂,其实最简单的计算器或者EXCEL表格即可得出结果。下面来验证:

六分仪基础篇总结
a.仪器的基础认识
b.校准与规范操作
c.仪器的精准读数
d.常规距离测算
e.超视距距离测算
下面将开始介绍六分仪在天文定位上的应用
6、海上定位
6.1核心概念:
a.天顶距:测者天顶与天体之间的角距离;(距离船位线,即90-高度)
b.海图标注:海图上作船位线的基准位置;(推算船位或者假定船位)
c.格林时角:从格林威治天文台,即经度000°向西所经过的角度,小于180°时符号为W,大于180小于360°时,用360去减,符号为E。超过360°时,先减去360°,再进行修正;
d.春分点:天球经度基准测算位置,除太阳外,所有恒星均以此为基准;
e.共轭赤经:除太阳外,所有恒星距离春分点的经差,同样向西起算。
6.2时间精度的重要性:(计算均统一至UTC)
地球每天以惊人的速度自转一周,赤道周长约40000公里,每小时1666公里。
结论:六分仪观测必须同步计时,误差1分钟将导致27.7公里(15海里)的定位偏差。
6.3航海图书资料准备:
航海天文历、航海天文历附表、天体高度方位表、秒表。
通过航海天文历及其附表,我们可以得到天体的如下数据:
纬度(赤纬)、经度(天体格林时角)、时间(UTC)。
我们有了天体的具体位置,接下来还有一个问题,画不了。
7、截距法
7.1基础观测步骤:
a.测量天体与水天线相切时的高度(太阳、月亮为下边缘)
b.同步记录时间(UTC)
7.2三要素定位体系
a.天体坐标(航海天文历及其附表)
b.推算船位(丢失GPS信号后的推算位置)
c.实测高度角(六分仪读数经修正后)
7.3通过ECDIS实现快速得到计算高度和方位:
a.输入:推算船位-天体坐标(电子海图两个转向点,大圆)
b.输出:得出计算方位和计算高度(高度为5400(90°)海里去减两个转向点之间的距离,大圆,此法省去查天体方位高度表内插过程)
c.比较:观测高度形成截距(观测高度减去计算高度,>0,离你的天顶更近,沿计算方位往天体方向,<0,离你的天顶远,沿计算方位背离天体方向)
8、修正项
8.1计算方位和计算高度
由于使用了ECDIS,无需使用天体高度方位表三个引数进行内插(纬度、时角、赤纬)
8.2观测高度
a.六分仪:器差+指标差;
b.天体观测高度误差:天体高度方位表首页左侧(太阳和星星)、太阳另加月份修正;
c.眼高差:1.765√e(天体高度方位表首页右侧,最高到32米)
d.异顶差:由推算船位时刻开始掐秒表,同步至观测时刻,V*(t2-t1)*cos(AC1-C)(三星定位一文中已讲过)
9、作图:红色推算船位,绿色实际船位。
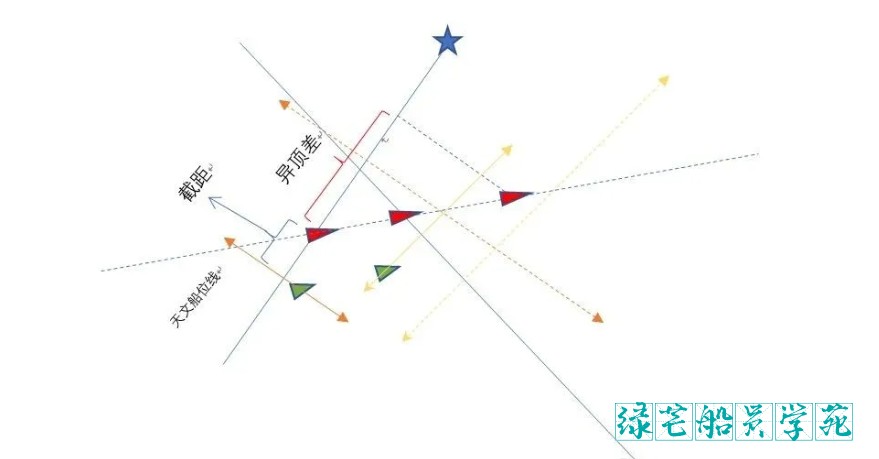
橙色天文船位线移动距离为异顶差t1修正到t3时刻。黄色t2到t3。
10、北极星求纬度/太阳中天求纬度/太阳特大高度定位/太阳中天前后移线定位(下期再讲)
- 发表于 2025-08-03 18:13
- 阅读 ( 831 )
请点击下载或复制按钮进行操作
